研究者情報
梅村 悠生(指導教員 : 和田 健太郎)

研究の概要

背景と目的
交通信号機は、都市における最も普遍的かつ重要な交通制御手法である。しかし、交通信号機による交通制御が不十分な場合は、車両の進行を妨げ、移動時間およびガス排出量を増加させる。これら交通信号機による悪影響を最小化する要素として、自動運転車両 (AV : Autonomous Vehicle) に関する研究が盛んにおこなわれている。
一方、既に実用化している信号制御の高度化技術として、グリーンウェーブが挙げられる。グリーンウェーブとは、信号交差点間を走行する全ての車両が青信号で通過できるよう、車両全体の速度を遅らせることで、車両の平均停止回数を減らす技術のことである。
しかし、現在のグリーンウェーブ技術は「全車両がグリーンウェーブ走行に従うか否か」という視点で研究が行われており、普及段階について考えられていない。そもそも、車両の停止を減らすためには全車両がグリーンウェーブに従う必要はない。
グリーンウェーブに従うAVが従わない一般車両を先導する、すなわち「ペースメーカー」の役割を果たすことで、AVと一般車両が混在する状況においても理想的な交通状態を実現できる可能性がある。これは、既に実用化された技術をベースとしており、比較的近い将来に有効になりうる手法であると考えられる。
そこで本研究は、
- 系統制御された信号群に自動運転車両が流入する環境において、
- ペースメーカーとしての自動運転車両の役割に着目し、
- 信号パラメータと自動運転の速度制御の最適状態を明らかにする
ことを目的とする。
モデル化
状況設定
まず、既存の系統信号制御研究[1]およびグリーンウェーブ研究[2]における基本的な状況設定について説明する。図2のような系統制御(連動制御)される2つの信号交差点に挟まれた道路(以下、リンク)について、次のような設定を考える。

- 信号設定
- リンク両端の信号のサイクル長(青信号表示の開始から次の青信号表示の開始までの時間)が等しい。
- リンク両端の信号のスプリット(青信号と赤信号の表示時間の比率)が等しく、青50%, 赤50%である。
- リンク両端の信号の飽和交通流率(単位時間あたりに停止線を通過できる最大の車両台数)が等しい。
- 車両設定
- 双方向(停止線 A から停止線 B 方向および停止線 B から停止線 A 方向)の直進交通が存在する。
- 交通需要が完全に飽和している(今回はスプリットが青時間 50%、赤時間 50%であるから、需要は飽和交通流率の 50%となる)。
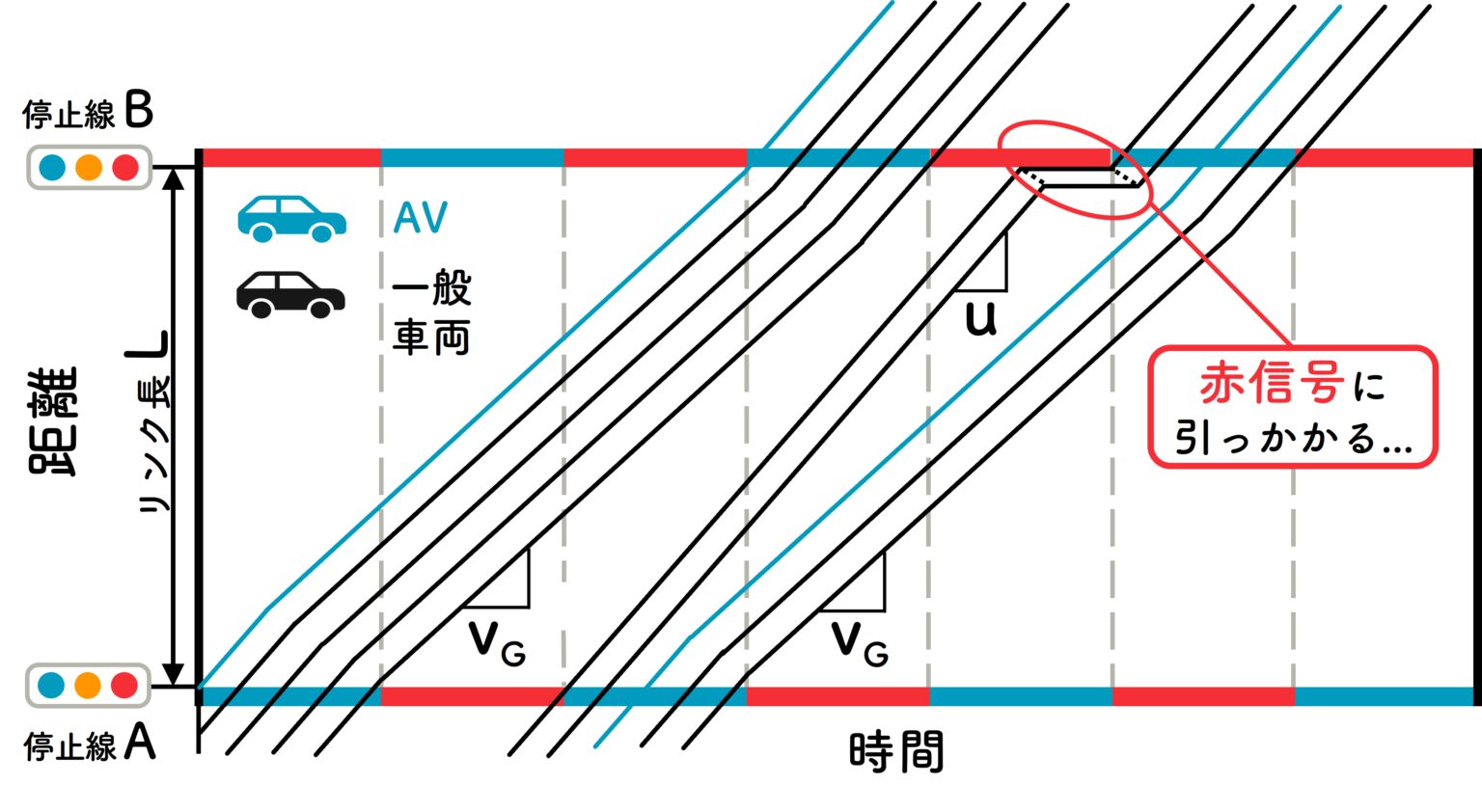
この設定をもとに、リンク内を走行する車両の軌跡を縦軸を距離に、横軸を時間に取った時空間図で表現すると、図3のようになる。左下から右上に伸びる線は、停止線Aから停止線Bの方向に走行する車両の軌跡を示し、左上から右下に伸びる線は停止線Bから停止線Aの方向に走行する車両の軌跡を示す。図3では、信号オフセットをg、 サイクル内ずれをh、サイクル長をC、リンク往復旅行時間をT、リンク長をL、系統速度(制限速度)をuと表現している。
- 信号オフセット:隣接交差点間の青信号表示開始時間のずれ
- サイクル内ずれ:下流交差点(リンク終端)の青信号表示が始まってから、車群の先頭車両が下流交差点に到達するまでの時間
- 系統速度:リンクの制限速度

既存理論の拡張
本研究では、既存研究の拡張として、一般車両とAVが混在する状況を考慮する。そこで、一般車両とAVのリンク内での車両挙動を次のように定義する。
一般車両
- 本研究では、人間によって運転操作される車両を指す。
- グリーンウェーブを実施しない。
- 自車が先頭車両の場合は、リンク間を系統速度uで走行し、下流交差点に到達した際に下流交差点が青信号のときはそのまま通過、赤信号のときは停止する。
- 自車が先頭車両以外の場合は、前車に追従する。
AV
- 本研究では、人間による運転操作を必要としない完全自動運転(レベル5)車両を指す。
- V2I(Vehicle-to-Infrastructure, 路車間) 通信を介して、リンク進入前に交差点の青信号およびリンク長の情報を入手し、この情報をもとにグリーンウェーブを実施する。
- 後述する速度制御禁止領域を抜けた時点において、リンク間を系統速度uで走行すると下流交差点を青信号で通過できることが予想される場合は、系統速度uで走行する。下流交差点において停止することが予想される場合は、系統速度u以下の一定速度で走行する。
- この速度は、下流交差点で停止することが予想される車群の先頭車両が、停止せずにちょうど下流交差点を通過できるような速度vG(以下、グリーンウェーブ速度)である。
なお、一般車両、AVとともに、リンクの外部では系統速度uで走行するものとする。以上を考慮し、一般車両とAVの車両軌跡を時空間図で表現すると、図3のように表される。図3の例では、一般車両は停止線Bの交差点で赤信号に引っかかるものの、AVは事前に速度を低下させることにより、この交差点で止まらずに通過できていることが分かる。
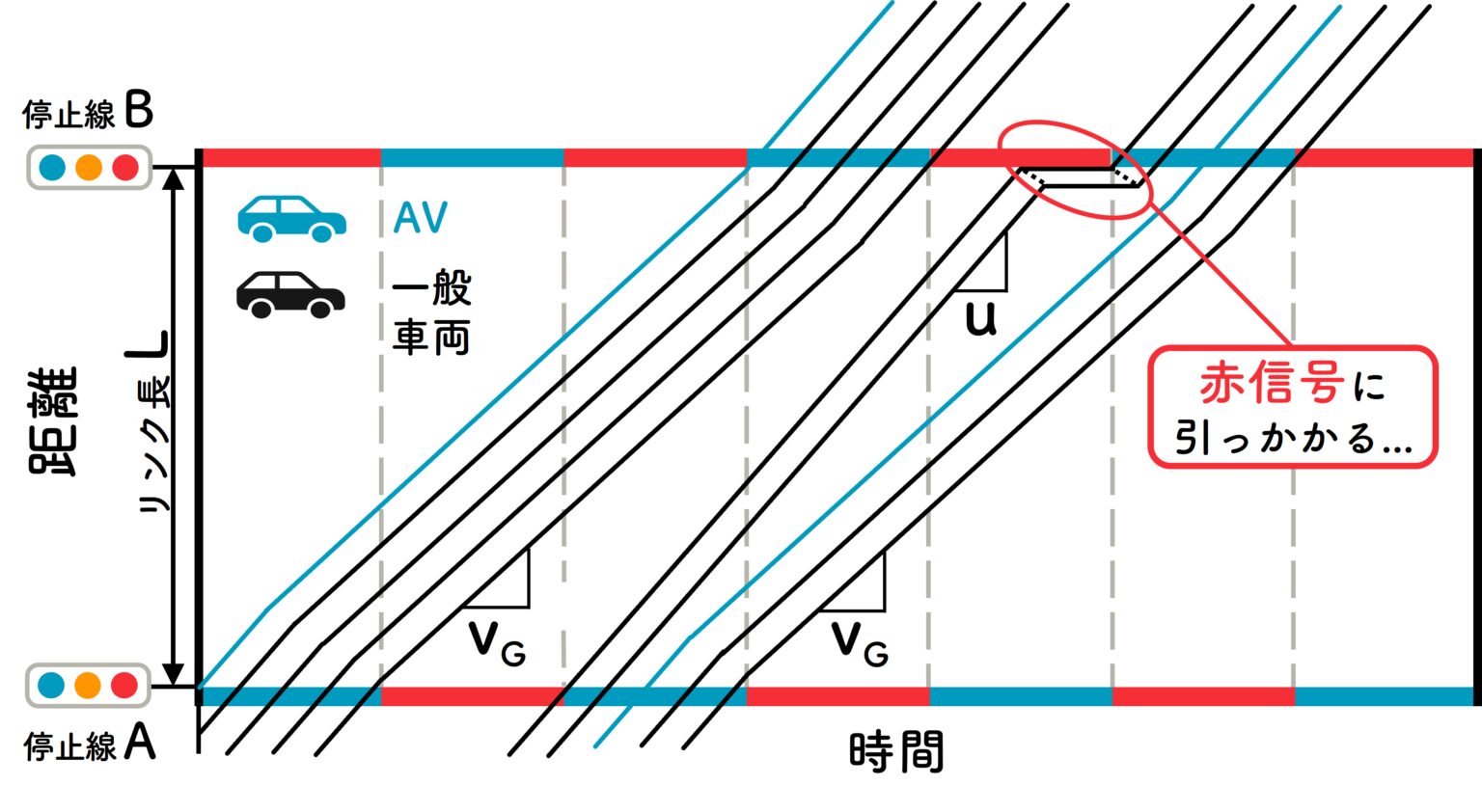
AVと一般車両が混在した場合の車両軌跡の例は、図4のように表される。AVが車群を先導している場合は、後続の一般車両が先頭のAVに追従し、結果として車群の全車両が停止線Bの交差点で止まらずに通過できている。しかし、AVが車群を先導していない場合は、先ほどの例のように赤信号で引っかかってしまう車両が発生する。このことから、車両の平均停止回数を減らすためには、車群の中のAVの位置が非常に重要になることが分かる。
なお既存研究の拡張として、本研究では、待ち行列の長さを考慮して交通流を表現する Physical Queue モデルを採用している。Physical Queue モデルでは、車群の先頭車両の速度が低下すると、後続車両の速度低下開始地点が上流交差点(リンク始端の交差点)側に伝播する。本研究ではこのことを考慮し、速度制御を禁止する領域を適切に設定することで、速度制御の影響が上流交差点以前に伝播することを防ぐ。
評価手法
グリーンウェーブの効果を評価する指標として、リンク内を走行する全車両(双方向)の平均遅れ、停止回数、CO2排出量を用いる。それぞれを以下のように定義する。
- 遅れ:車両がリンクを通過するのに余分にかかる時間
- 停止回数:車両がリンク終端の赤信号によって停止する回数
- CO2排出量:車両がリンクを通過するのに伴い排出した CO2の量
本研究では、前述した拡張理論をモデル化し、これを解析することによって、車両1台あたりの平均遅れ、停止回数、CO2排出量を独自に定式化した。
分析
前章の理論をもとに、
- あらかじめ遅れ、停止、CO2排出量、それぞれの観点から最適なオフセットを取っている状況で、
- サイクル長(40 – 180[s]) によって平均遅れ、停止回数、CO2排出量がどのように変化するかについて、
- AV 普及率 (p= 0, 5, 10, 50, 100[%])ごとに
分析した。
理論分析では、飽和交通流率を2000[台/h]、系統速度uを 10[m/s]とし、リンク長が短い場合(L = 300[m])、長い場合(L = 1000[m])について分析した。すなわち、往復旅行時間は前者がT = 60[s], 後者がT = 200[s]となる。
これに加え、より現実的な状況における各指標の分析を行うため、理論を再現するシミュレーション環境を構築した。これを用いて、交通需要が非飽和の場合、隣接交差点間のスプリットが異なる場合の分析を行った。
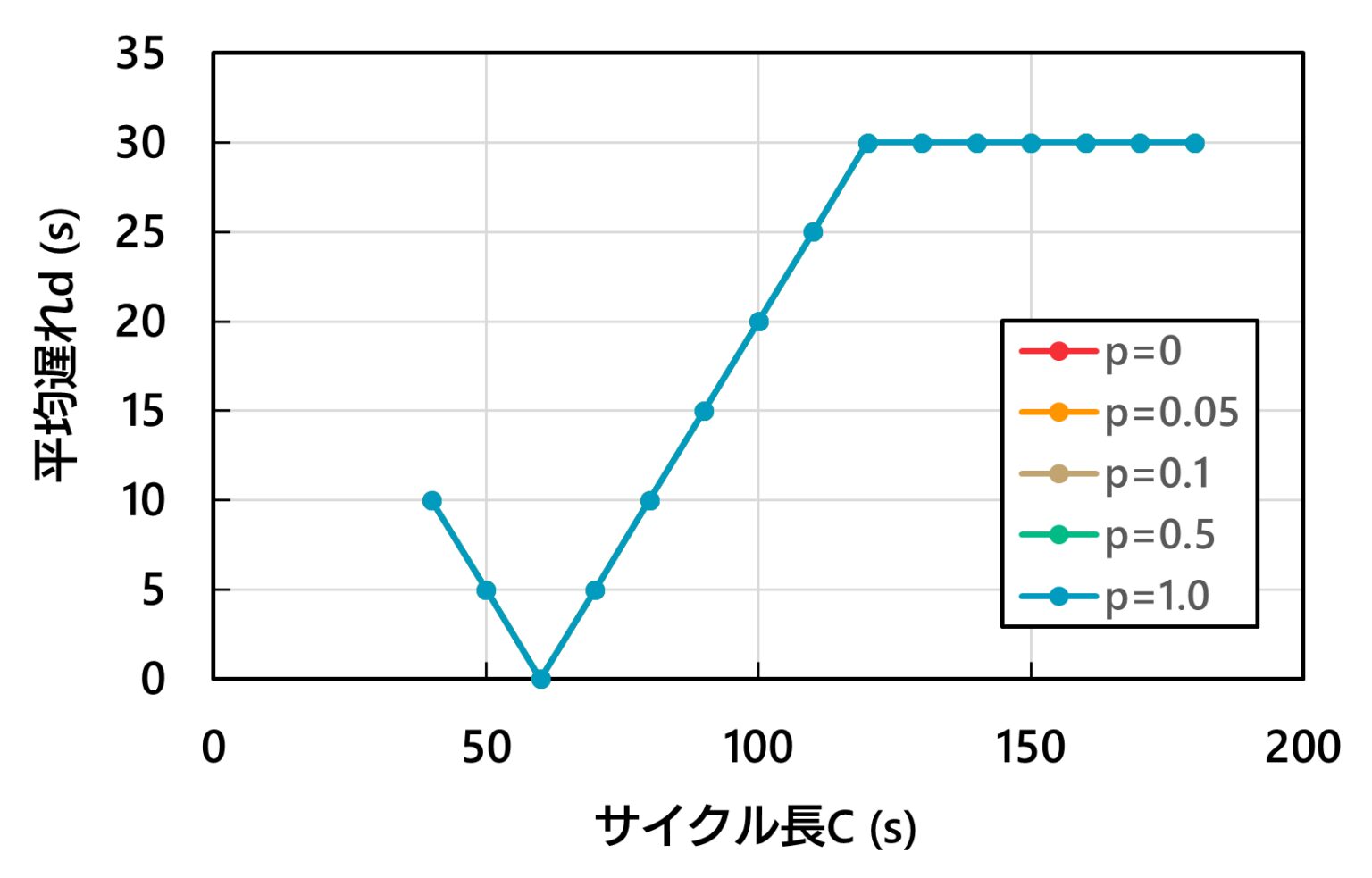
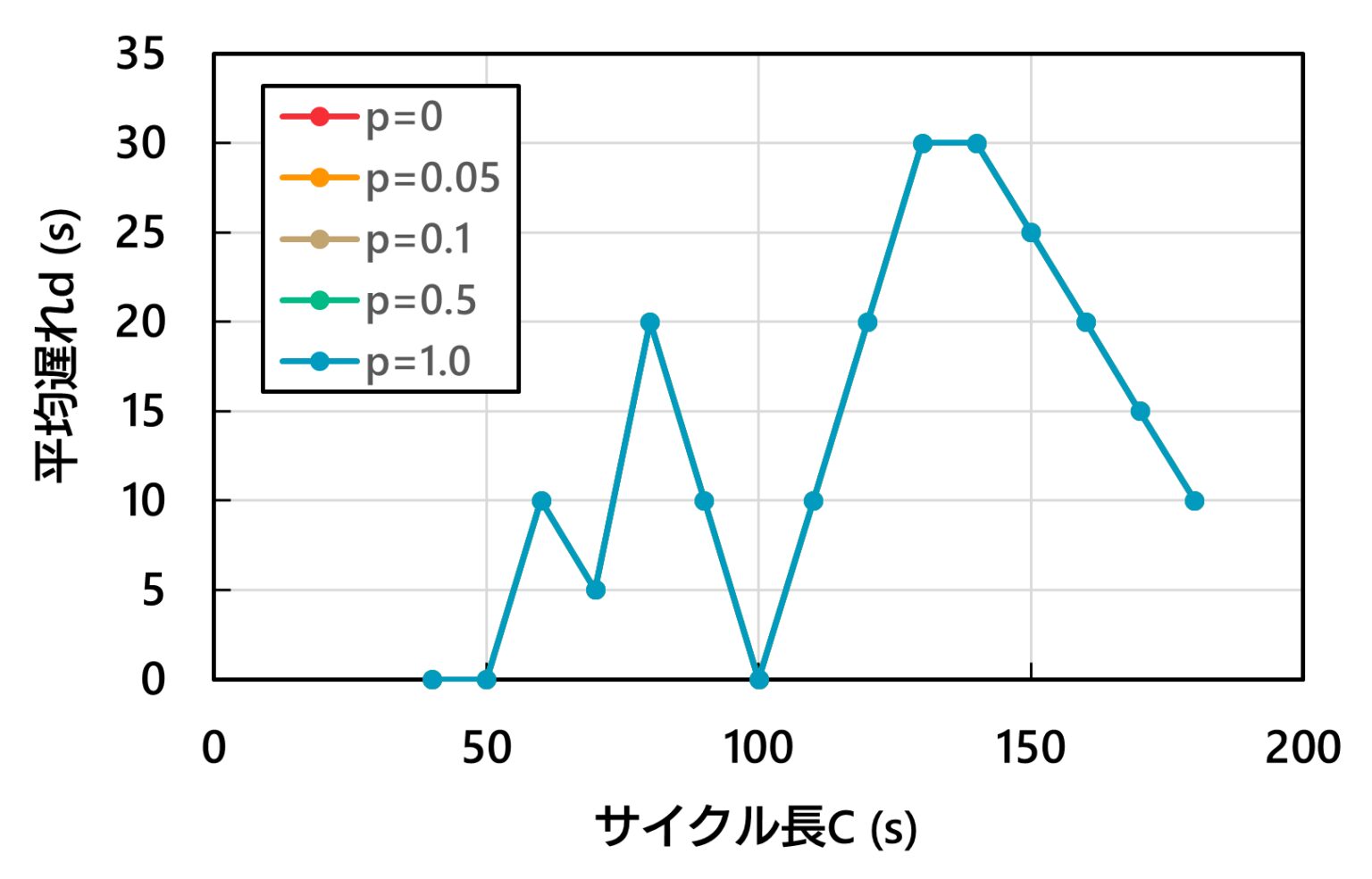
平均遅れ
理論分析の結果を図5,6に示す。分析の結果から
- 普及率によらず平均遅れは一定となる
ことが分かった。
平均停止回数
理論分析の結果を図7,8に示す。分析の結果から、
- 普及率が上昇するにつれて平均停止回数が減少する
- 普及率100[%]のとき、サイクル長によらず停止が0となっている
ことが分かる。

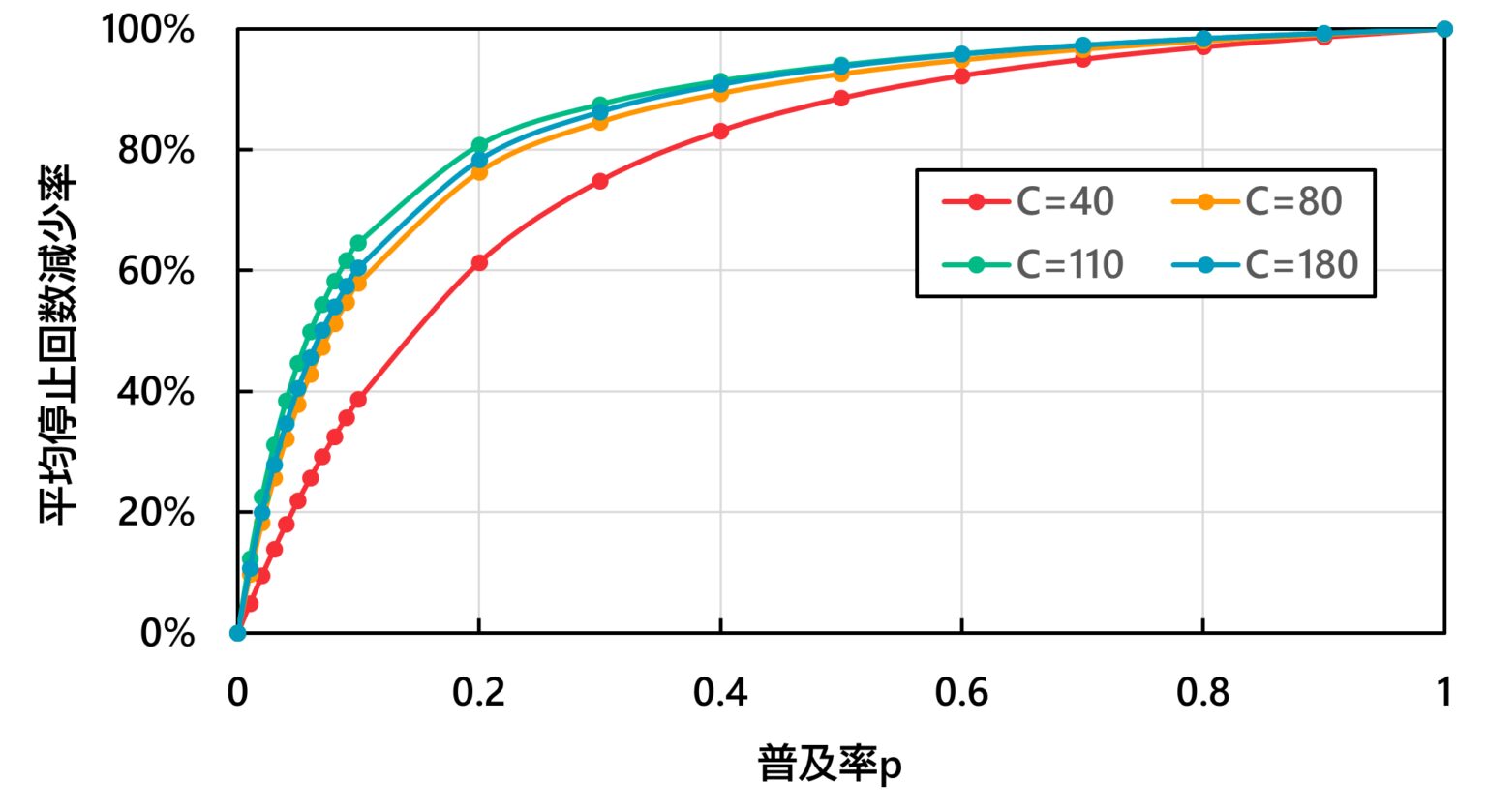
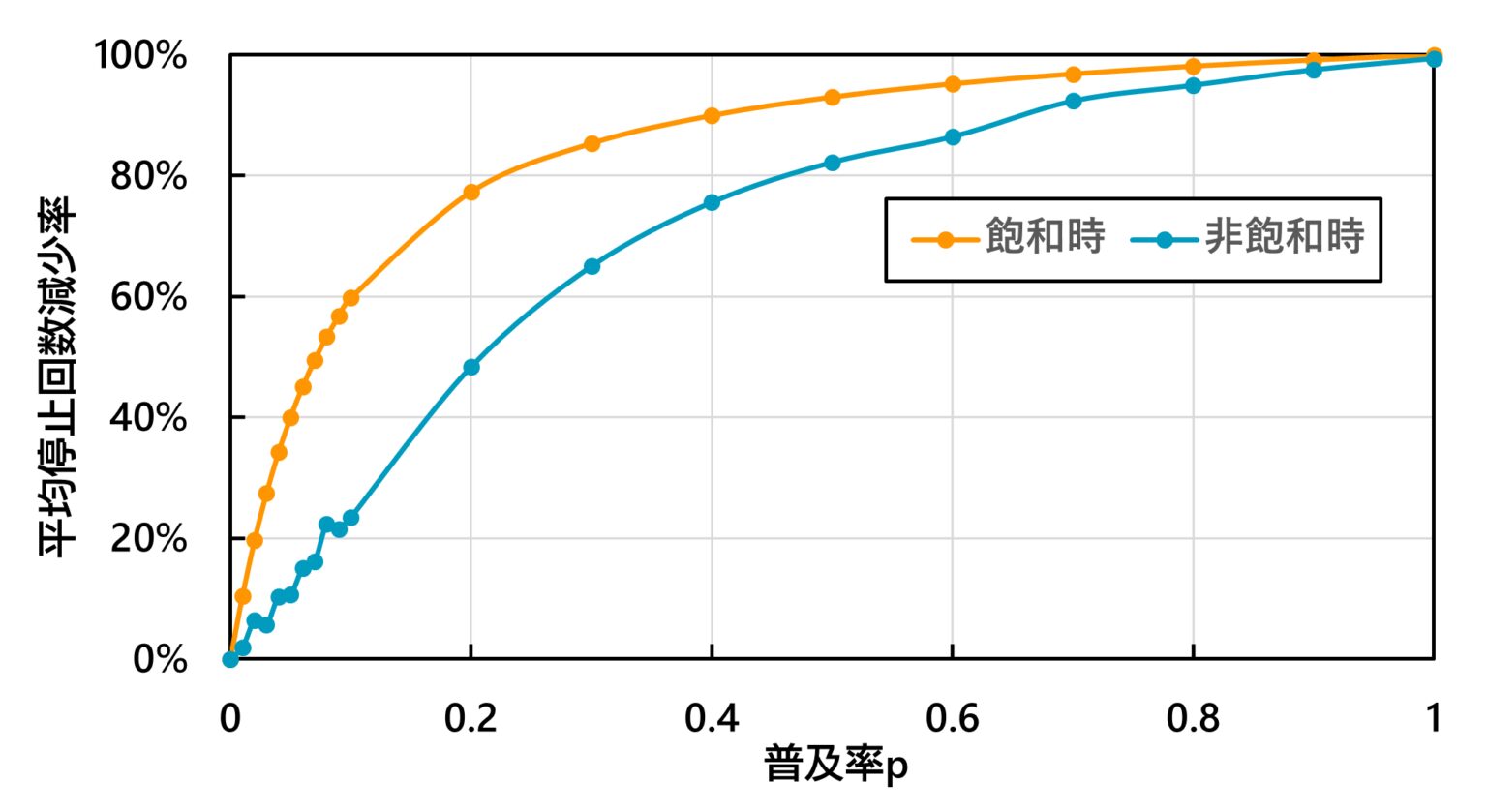
また、飽和時(L = 300)のサイクル長ごとの普及率 – 平均停止回数減少率の関係を図8に、飽和時と非飽和時の普及率 – 平均停止回数減少率の関係を図9,10に示す。図9,10から、
- サイクル長が大きいほど、停止の減少効果が高い
- 非飽和時よりも飽和時の方が、停止の減少効果が高い
ことが明らかになった。これは、サイクル長が大きいほど、または交通需要が飽和に近いほど車群自体のスケールが大きくなり、制御を受ける車両の台数も大きくなるからであると考えられる。

平均CO2排出量
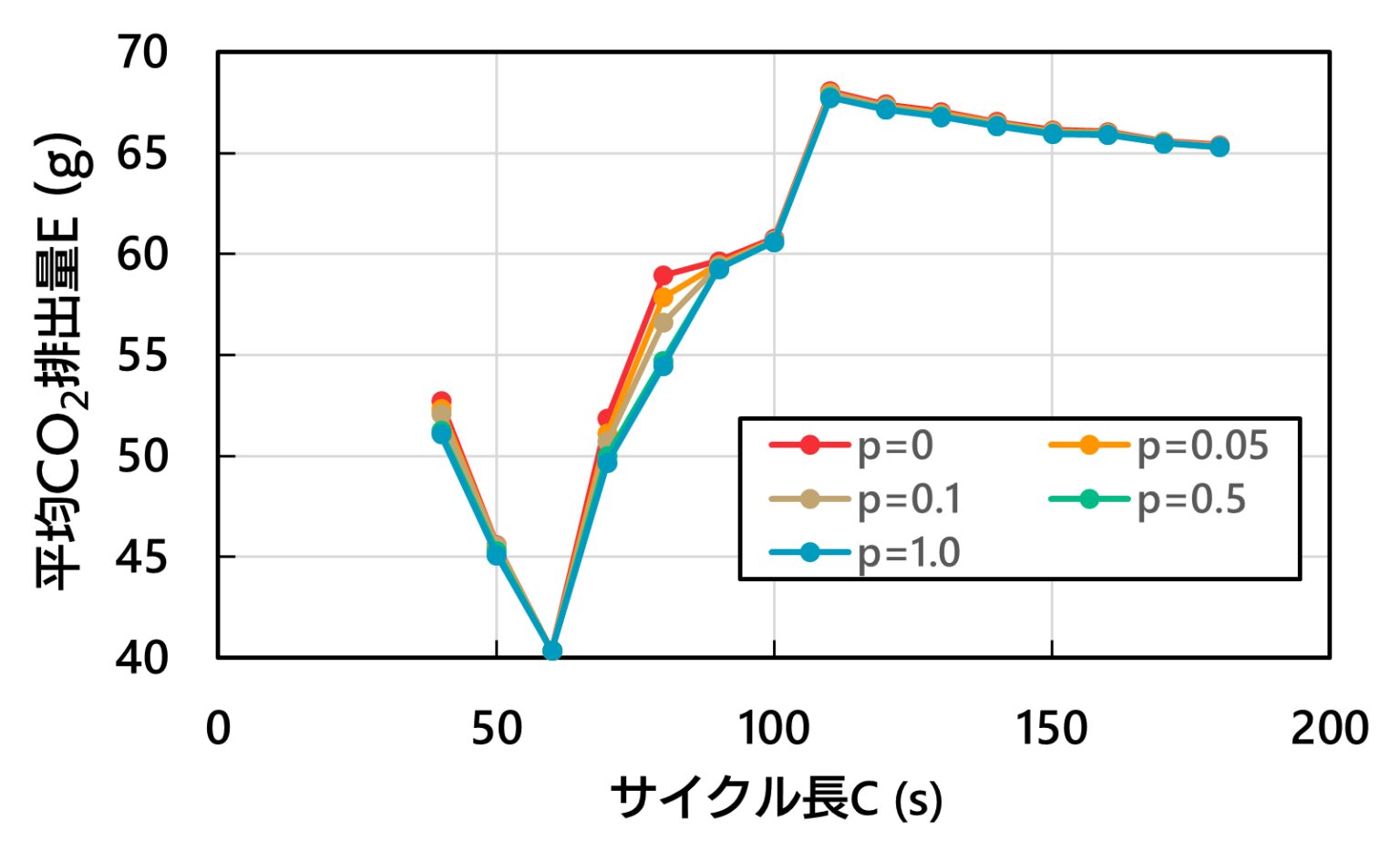
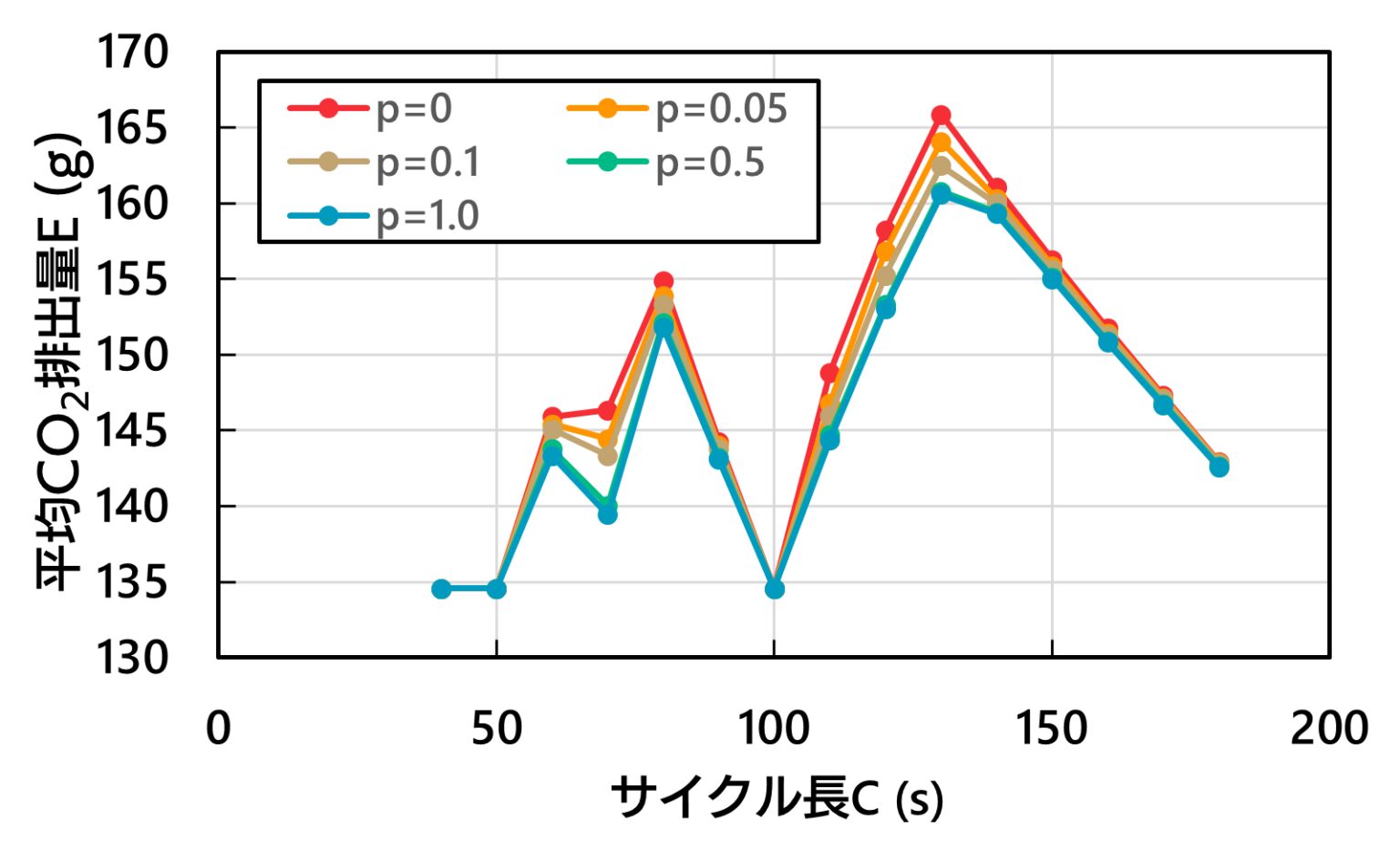
理論分析の結果を図11,12に示す。分析の結果から、
- AV 普及率の上昇に伴って CO2 排出量が減少している
ことが分かる。
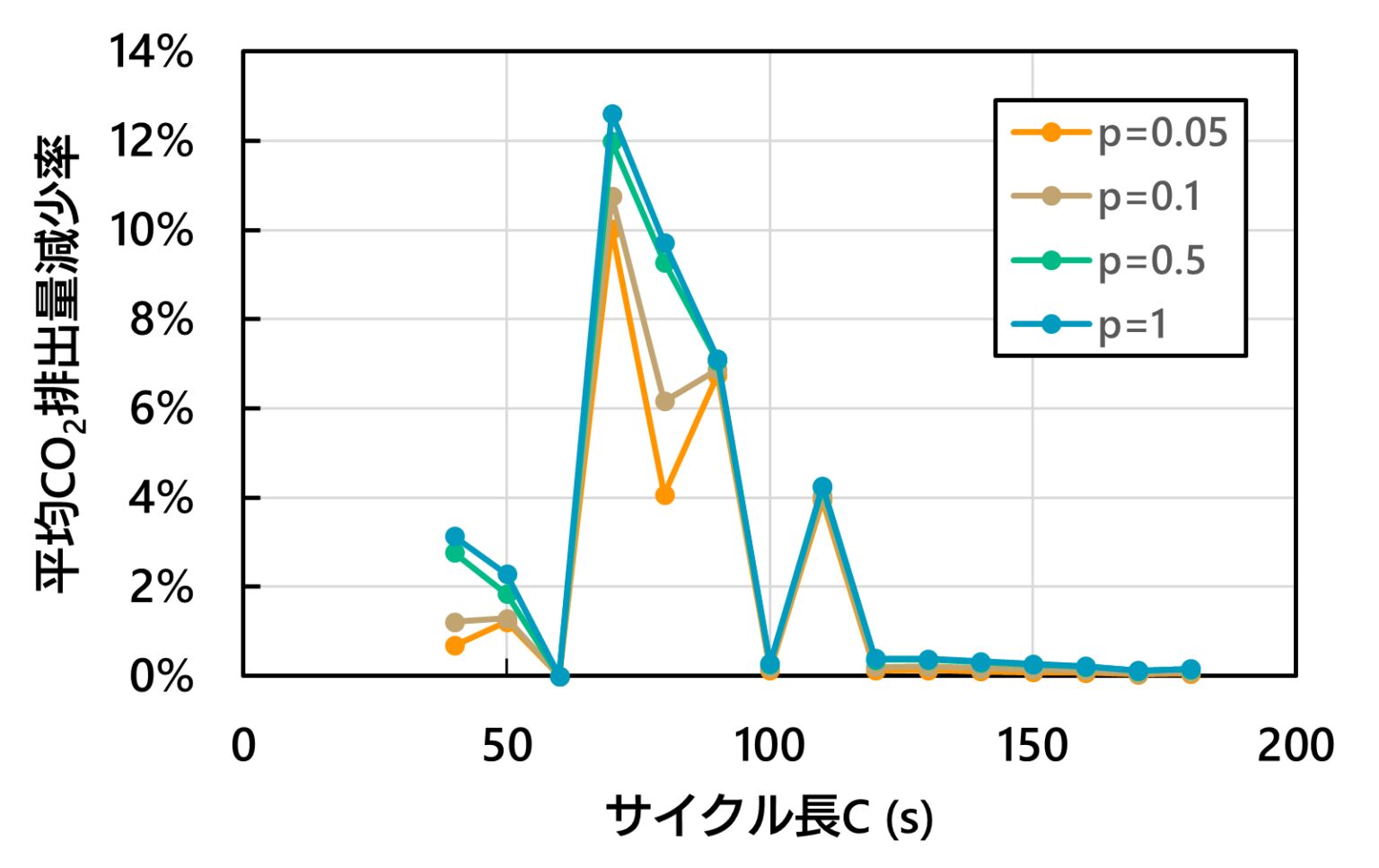
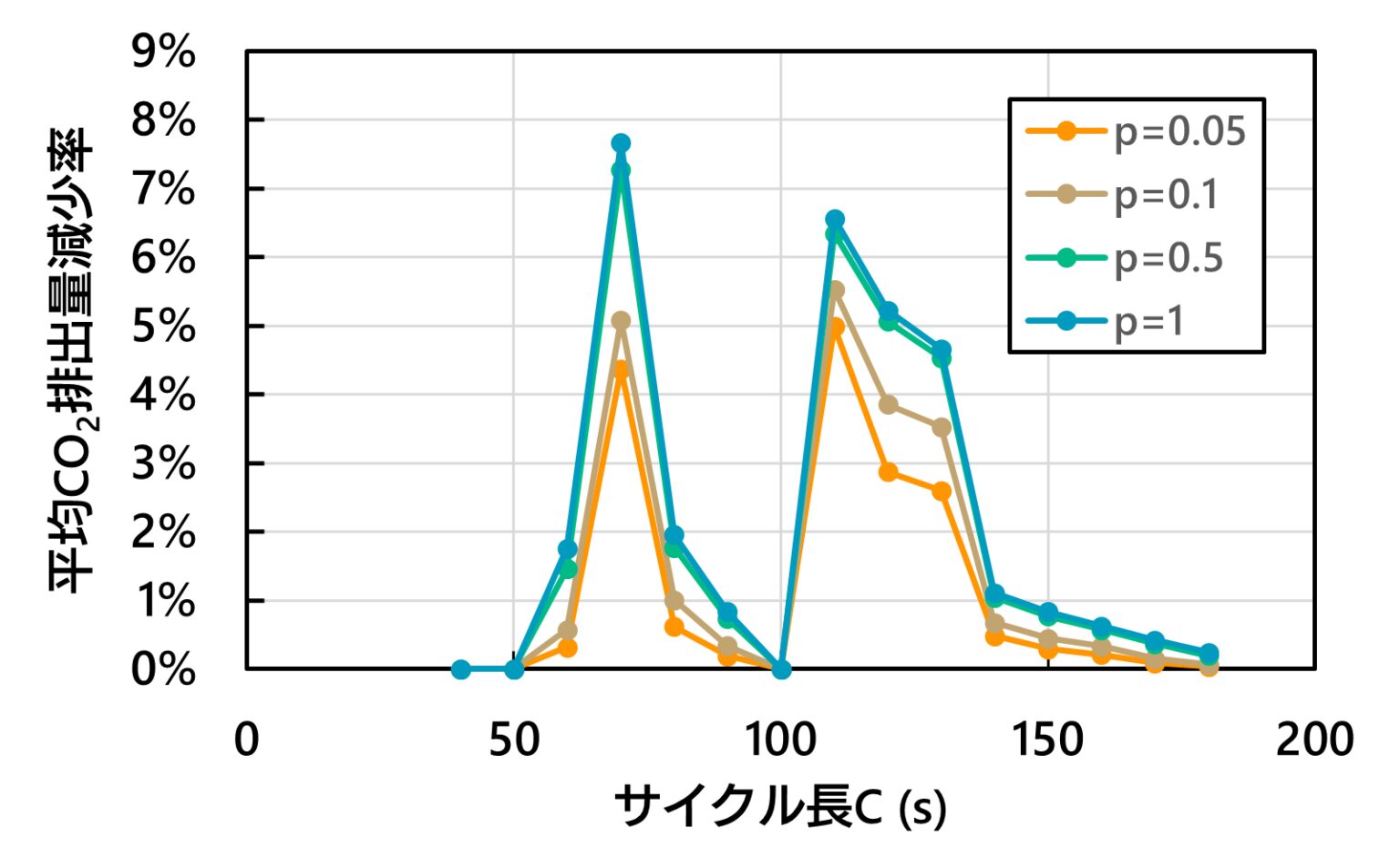
また、普及率ごとの平均 CO2 排出量減少率を図13,14に示す。本研究の理論をもとにグリーンウェーブを実施することにより、平均CO2排出量は
- L = 300で最大 12.6%減少
- L = 1000で最大 7.6%減少
することが明らかになった。
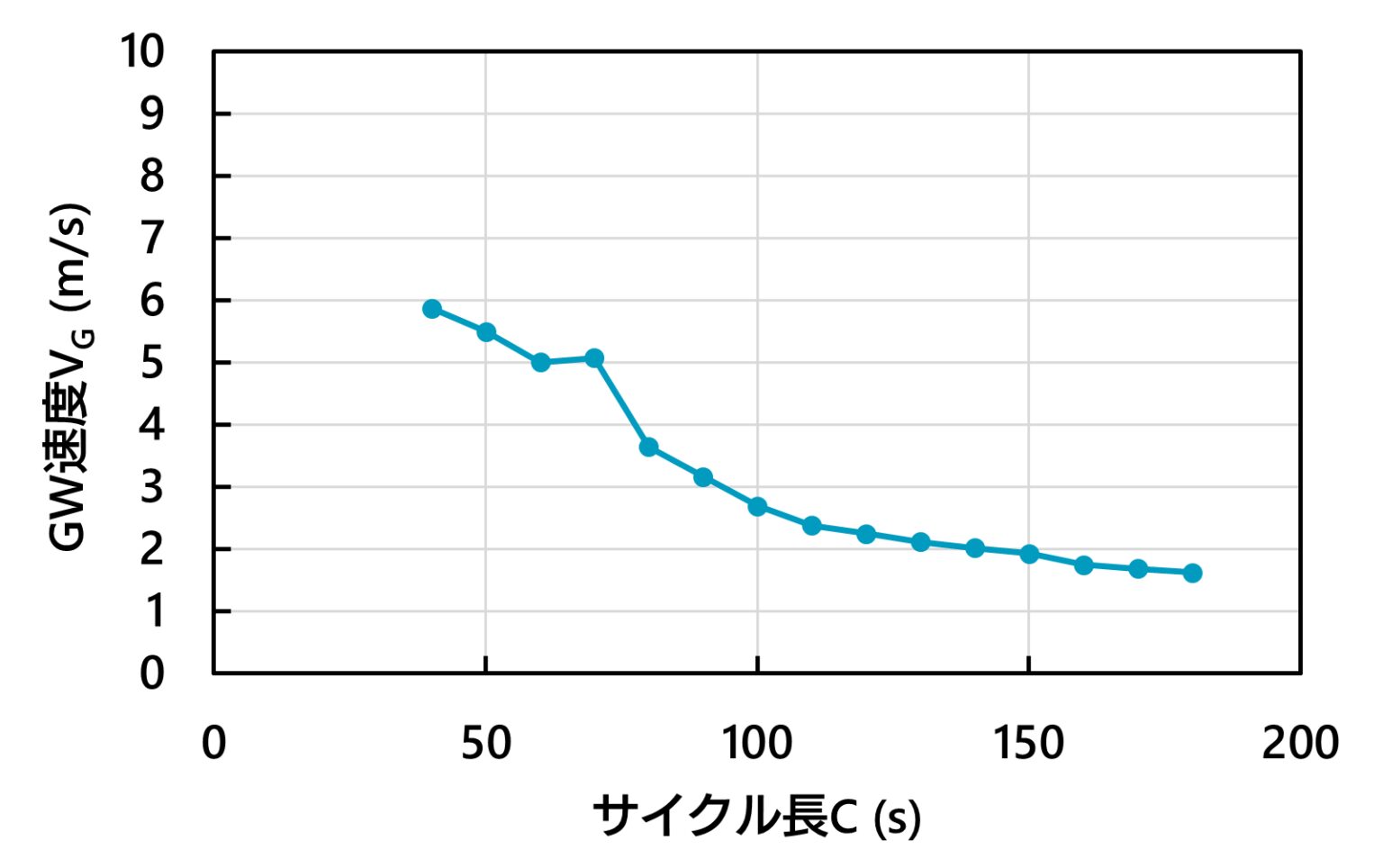
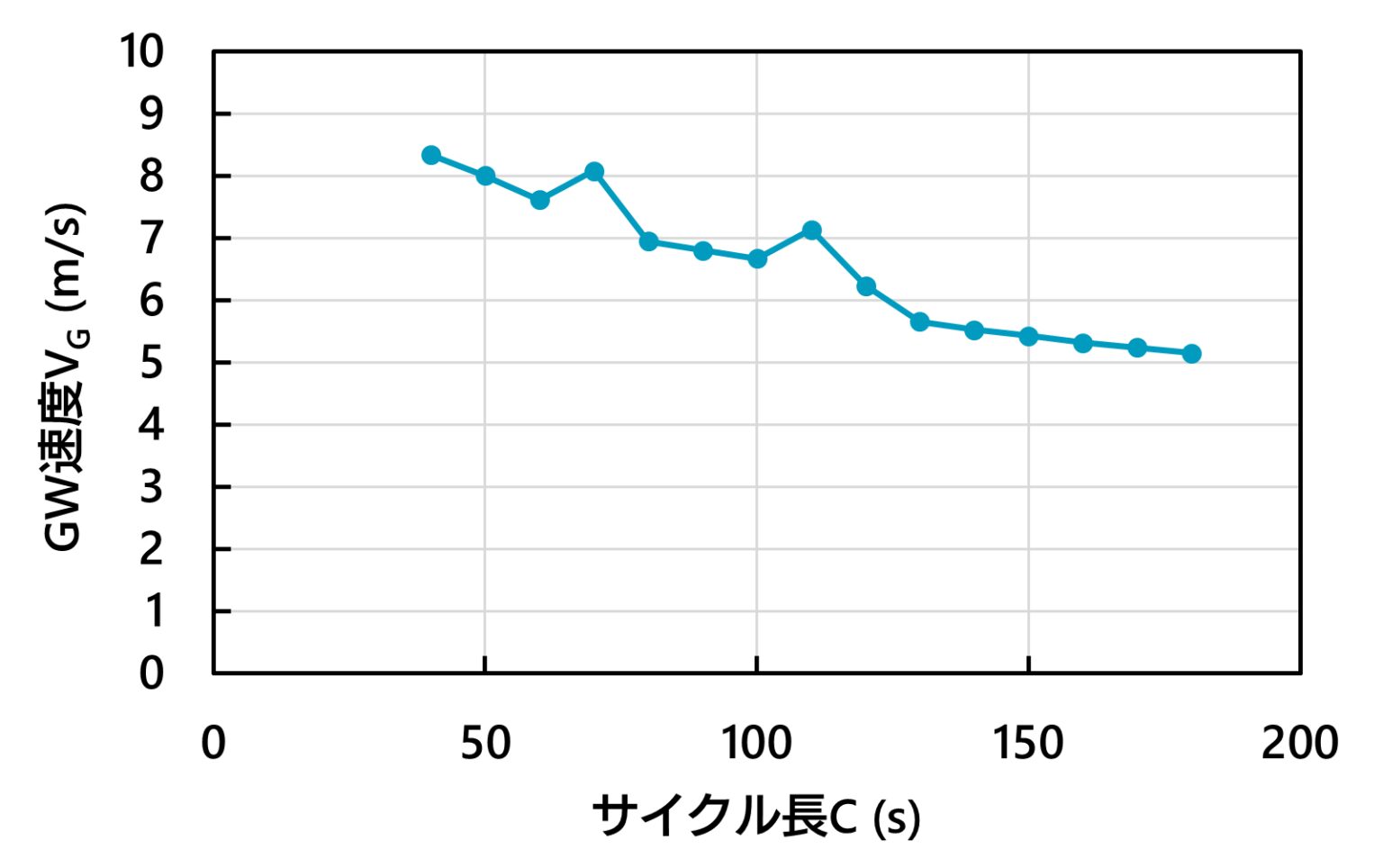
最後に、CO2排出量の観点から最適なオフセットを取ったときのグリーンウェーブ速度vGを図15,16に示す。グリーンウェーブ速度は、一般車両のドライバーが AVによる速度制御を受容するか否かという点に大きく関連するものと考えられる。具体的には、グリーンウェーブ速度と系統速度u(10[m/s])があまりにも離れていると、一般車両のドライバーがAVに追従することに苛立ち、AVを追い越してしまうことで、速度制御の実効性が低くなる可能性がある。図15,16から、
- グリーンウェーブ速度はサイクル長が大きくなるのに伴って減少する
ことが分かる。このことから、サイクル長を小さく取ったときの方が、道路利用者の視点から見てもより速度制御の実効性が高くなることが分かった。
まとめ
本研究では、系統信号群においてペースメーカーとしての自動運転車両(AV)の役割に着目し、信号パラメータとAVの速度制御の最適状態について明らかにした。具体的には、
- 従来の系統信号制御およびグリーンウェーブの理論を (1) 待ち行列長を考慮した場合、 (2) AVと一般車両が混在する場合に拡張した。
- この拡張理論に基づき、遅れ、停止、CO2排出量、各々の観点から最適な信号制御パラメータの特性を分析した。
- さらに理論を再現したシミュレーション環境を構築し、需要が非飽和の場合、交差点間の青信号と赤信号比率が異なる場合について分析した。
理論分析およびシミュレーション分析の結果、次のことが明らかになった。
- AVの速度制御を実行する区間を設定することにより、車両の遅れを変化させることなく停止および CO2排出量を減少させることができる。
- 信号のサイクル長が大きいほど、あるいは交通需要が飽和に近いほど停止の減少効果が大きい。
- サイクル長が比較的小さいときに、CO2排出量を最大で10%程度減少させることができる。
- サイクル長が比較的小さいときに、道路利用者の視点から見ても速度制御の実効性が高まる。
以上より、AVが「ペースメーカー」として車群の速度を制御することで、系統信号群における交通状態を改善できることが明らかになった。
参考文献
- 越正毅. 1975. “系統交通信号におけるサイクル制御の研究.” 土木学会論文報告集 1975.241 : 125-133.
- 國方健太郎. 2014. “信号オフセット及び走行速度の制御による車両エネルギー消費量変動分析.” 2013年度東京大学工学系研究科社会基盤学専攻修士論文
この記事は、以下の論文を要約したものです。
梅村悠生. 2023. “自動運転車両の速度制御を考慮した系統信号制御の最適化. ” 2022年度筑波大学理工学群社会工学類卒業論文
編集後記
- 筆者が交通システム科学研究室(Transportation System Science Lab.)に配属された際は、信号制御どころか交通工学すら全くの素人であり、最初はゼミの内容についていくだけで精一杯の日々が続きました。
- 様々な壁を乗り越え、最終的にこうしてケースバンクで紹介していただけるような面白い研究成果を出すことができたのは、ひとえに和田先生のご指導のおかげであると感じております。この場をお借りして感謝申し上げます。